日新の新たな取り組み、にっこりプロジェクトの概要
芳賀町の特産品の梨にあやかった名前を頂いた「にっこりプロジェクト」は、その栽培において半自動化を試み、生産者の負担を如何に軽減できるか?をメインテーマとして、スタートしました。梨農家のみなさんにご協力を頂き、まずはその作業工程を分析し、どの部分で改善を行うチャンスがあるのか?といった検討を重ねました。
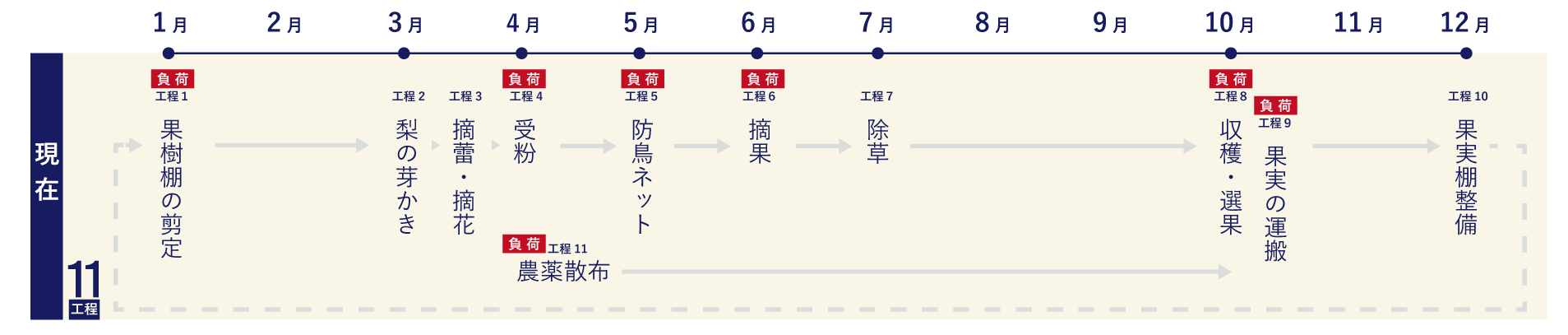
従来の作業工程は11に分類され、1年を通して何かしらの作業が発生する、いわゆる農閑期と呼ばれる時期が殆ど無いことが労働負担増や担い手不足の要因の一つとなっていることが分かりました。また工程毎に専用農具の使用が必要となるなど、コストアップや環境負荷に繋がる要因があることも見えてきました。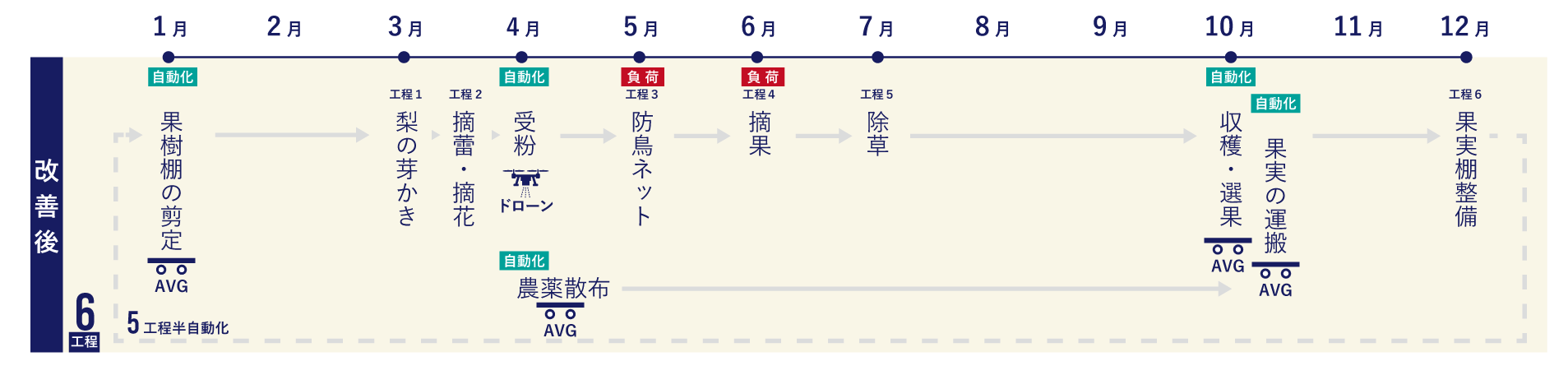
にっこりプロジェクトでは、現状の工程の約半数の5工程の半自動化を行うことで効率化を図れるのでは?という課題にターゲットを絞り、3つの技術導入を行うべく、2023年夏から実証実験をスタート。本プロジェクトにご協力いただいている梨農家のみなさんからフィードバックを頂きつつ、実用化に向けた機材の開発・改良を行っております。
具体的な新技術導入
日新では半自動化機材の具体化に向けて、2つの企業と開発を進めております。AGVと呼ばれる無人搬送車ではREACT株式会社様、ドローン技術では栃木スカイテック株式会社様と連携し、生産者のニーズが高い行程への導入に向けて、改良を重ねています。
AGV 追従・自動走行実験
 梨農園(圃場/ほじょう)には、枝を支える為の棚が約2m弱程度の高さに張り巡らされているため、通常の高さの車両を乗り入れて作業を行うことが出来ません。しかしながら日々の農場の手入れの際の農工具や肥料の運搬、収穫時の梨の運搬は手作業で行われているため、非常に大きな負担となっています。日新ではこの負担軽減を目指し、自動追尾機能を持ったAGVの導入を目指して、REACT社と開発を進めています。作業をされる方の動きに合わせて発進・停止を自動的に行う他、梨農園(圃場)内のマッピングデータを予め入力することで、自動走行も可能となります。
梨農園(圃場/ほじょう)には、枝を支える為の棚が約2m弱程度の高さに張り巡らされているため、通常の高さの車両を乗り入れて作業を行うことが出来ません。しかしながら日々の農場の手入れの際の農工具や肥料の運搬、収穫時の梨の運搬は手作業で行われているため、非常に大きな負担となっています。日新ではこの負担軽減を目指し、自動追尾機能を持ったAGVの導入を目指して、REACT社と開発を進めています。作業をされる方の動きに合わせて発進・停止を自動的に行う他、梨農園(圃場)内のマッピングデータを予め入力することで、自動走行も可能となります。
AGV 農薬散布実験
 AGVの荷台上に液体タンクや散布ノズル、ポンプなどを設置し、農薬を散布する作業を半自動化する取り組みです。農薬の散布作業は受粉が始まる4月から10月の収穫期まで、数回行われており、専用機材で満遍なく散布する必要がある、負担の大きな作業となっています。前述の作業・収穫用のAGVと走行部分を共有することで、自動走行を行いながら散布を行うことを目標としています。
AGVの荷台上に液体タンクや散布ノズル、ポンプなどを設置し、農薬を散布する作業を半自動化する取り組みです。農薬の散布作業は受粉が始まる4月から10月の収穫期まで、数回行われており、専用機材で満遍なく散布する必要がある、負担の大きな作業となっています。前述の作業・収穫用のAGVと走行部分を共有することで、自動走行を行いながら散布を行うことを目標としています。
ドローン溶液受粉散布実験
 既に農薬散布などで活用されているドローン技術ですが、従来はみつばちを用いて行われていた工程を、ドローンを用いて行えないか?という研究です。具体的には溶液花粉をドローンより梨の花に向けて散布し、当日の天候や噴霧量などの調整を行いつつ、受粉率の向上を図るテストを行う予定です。
既に農薬散布などで活用されているドローン技術ですが、従来はみつばちを用いて行われていた工程を、ドローンを用いて行えないか?という研究です。具体的には溶液花粉をドローンより梨の花に向けて散布し、当日の天候や噴霧量などの調整を行いつつ、受粉率の向上を図るテストを行う予定です。
トライアルを行う試験圃場とは?
2025年の生産活動が本格化する前の2月、AGVの荷台上に設置した農薬散布装置の散布・走行テストが行われました。日新では約4反(40アール)・約60m四方に広がる160本の梨の木が仕立てられた圃場をご提供いただき、実際に各種試験を行いつつ生産作業を進めるトライアルを進めることになりました。

テストが行われる梨圃場。一文字立てと呼ばれる仕立て方の梨の木が並ぶ。
植栽から4~5年程度の若い木が整然と並ぶ圃場で、「一文字立て」と呼ばれる比較的新しい仕立て方が行われていました。これは棚下約40~50センチ程度で主枝を左右2つに分け、枝を漢数字の一のように真っ直ぐに伸ばして行く方法です。従来の方法と比較して主枝が太く、その全長も長く成長します。また枝を横一列に広げることで、多くの果実が均等に太陽の光を浴び、果実の成長が均等化することが期待でき、木の内部まで風が通りやすくなり湿気がこもりにくくなることで、病害虫の発生を抑える効果も合わせて期待できます。
農薬散布実験に用いられる機材

従来から行われている、SSによる散布作業
従来はSS(エスエス/Speed Spreader)と呼ばれる専用の車両を用いて農薬を行っています。背の低い果樹園での走行を考慮した背の低い小型の機材で、車両中央部のタンクに搭載された農薬を後方のノズルから噴射すると同時に、大きなプロペラを回転させ気流を発生させて周囲へ拡散させる方式です。農薬散布では大きな効果を持つものの、大きな圃場の全てに散布させるには、人が乗車して走行・操作する手間が膨大です。また専用機材導入のコストも高額となります。
農薬散布実験に用いられるAGV(Automatic Guided Vehicle/無人搬送車)は、宇都宮大学発のベンチャー企業、REACT株式会社様が開発したものを用いています。荷台上に農薬散布装置を設置したロボットが開発されました。ロボット自体はリチウムイオン電池を搭載した電気駆動で、ジョイスティックによる遠隔操作の他、予め登録した地点を自動走行する機能や人の動きに合わせて発進・停止を行う人追従機能の3つの操作方法を選択することが可能です。農薬散布装置を下ろせばフラットの荷台を持つ作業台車となり、人追随機能を用いることで、両手が空いた状態での操作が可能となり、その他、農工具や収穫時の梨の運搬台車としての活用も可能で、複数の機能を持たせた汎用機械として、効率化やコスト削減が期待されています。

AGVの荷台上に設置された散布装置
農薬散布装置はエンジン駆動でポンプを動作させ、荷台上に設置されたタンクからノズルを通して農薬を噴射、二つの大きなプロペラで上昇気流を発生させ、拡散させる方式となっています。このプロペラや駆動するモーターは、大型ドローン用のパワフルなものを流用することで、求められる性能に近づけています。SSのように専用部品を開発することなく、汎用部品で構成することで、コスト削減やメンテナンス性の向上を目指しています。
圃場内での走行・散布のテスト

給水を終え、人追従機能で圃場に戻るAGV
4月頃から本格化する農薬散布を前に、2月下旬に走行・散布テストが行われました。圃場内の地面は草刈りが行われ手入れが行われているものの、相応に凹凸があります。その中を自動走行させながら散布を行うという、本番環境下での導入テストです。テスト走行を前に散布する水をタンクに補充すべく、給水場所まで人追随機能で走行させます。前方を歩く人の速度に合わせてスピードも変化し、問題なく目的地まで辿り着くことが出来ました。今回はテストですので、実際の農薬ではなく、タンク内には約100リッター程度の水が補充されました。

自動走行をしながら、広範囲への散布が行えることを確認した
いよいよテスト走行がスタートし、一文字に枝を広げて並ぶ梨の木の列に沿って自動走行を行い、圃場の手前から奥まで、車輪が嵌ってしまったりすることなく走行することが確認出来ました。これは事前に圃場内の位置を制御装置内に登録することで自動運転を可能としています。また折り返し地点では、自動的にUターンするようにデータが登録されており、実際に問題無く向きを変え、戻ってくることが確認出来ました。噴霧状況も概ね良好で、各所にある梨の枝がしっかりと濡れていることが合わせて確認出来ました。専用機材のSSは大型で、そのパワフルさでは軍配があがるものの、小回りが効き散布効果や自動走行機能が問題無く動作することが確認できたので、4月以降の農薬散布工程に導入する目途が立ったと言える結果となりました。
散布テストの様子を動画でご覧いただけます!
「にっこりプロジェクト」今後の展開
 「にっこり」は栃木県で開発されたオリジナル品種で豊水と新高の交配によって、1996年に生まれました。その名の由来は、栃木県の世界的な観光地の「日光(にっこう)」と「笑顔=にっこり」の語呂合わせで、「食べてにっこり、作ってにっこり」という想いが込められています。大きさが特徴的で、1玉が約1kgにもなることがあります。また甘みが強く、果汁がたっぷりでみずみずしく、シャキシャキとした食感が楽しめます。
「にっこり」は栃木県で開発されたオリジナル品種で豊水と新高の交配によって、1996年に生まれました。その名の由来は、栃木県の世界的な観光地の「日光(にっこう)」と「笑顔=にっこり」の語呂合わせで、「食べてにっこり、作ってにっこり」という想いが込められています。大きさが特徴的で、1玉が約1kgにもなることがあります。また甘みが強く、果汁がたっぷりでみずみずしく、シャキシャキとした食感が楽しめます。
さらに、収穫時期が10月からから11月頃と遅いため、他の品種が出回らなくなる時期にも楽しむことができます。また冷暗所ならば2カ月弱の貯蔵が可能ということも特徴となっています。最近では東南アジアを中心に輸出の機会も増えており、世界へ「にっこり」のおいしさをお届けすることが、日新の目指すゴールです。
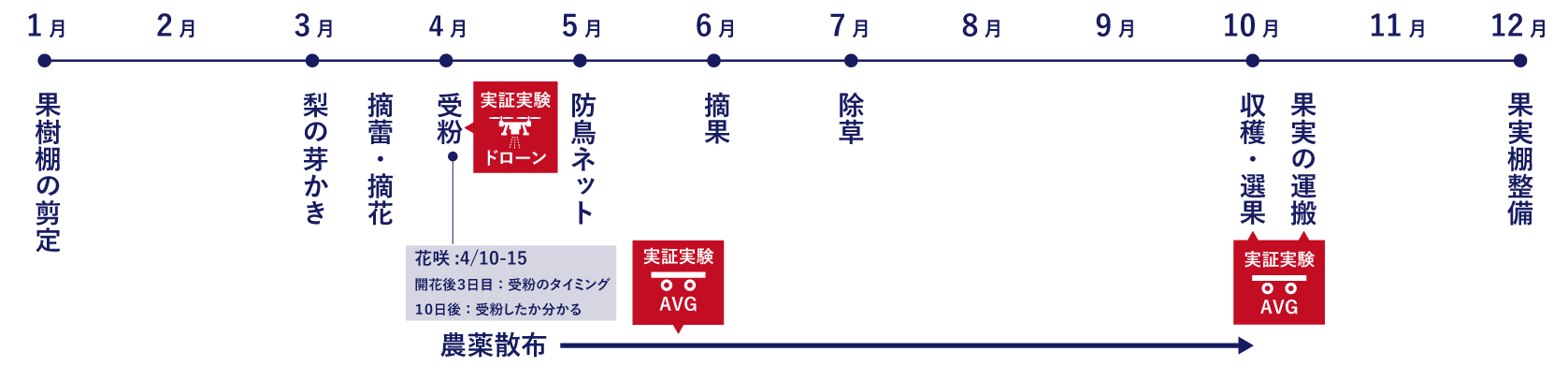 この春の受粉工程から10月頃の収穫まで、AGVやドローンを用いた実証実験を進めていく予定です。各工程のスケジュールは、以下の通りとなります。直近では3月にはドローンを用いた疑似受粉の散布テスト、4月中旬の開花期には実際に花粉を噴霧する予定です。今後の進展にご期待ください!
この春の受粉工程から10月頃の収穫まで、AGVやドローンを用いた実証実験を進めていく予定です。各工程のスケジュールは、以下の通りとなります。直近では3月にはドローンを用いた疑似受粉の散布テスト、4月中旬の開花期には実際に花粉を噴霧する予定です。今後の進展にご期待ください!
本プロジェクトに取り組む日新北関東ロジスティクスセンターの詳細はこちら